OlĂĄ Pessoal
Ultimamente eu tenho lido muito sobre configuraçþes de esc, resolvi me aprofundar nas configuraçþes do esc, dando sequencia hoje eu estou fazendo um tutorial sobre os castle link, que Ê o software da castle para confuguraçþes avancadas do esc, muitas configuraçþes são igual no Mamba Max, Mamba Max Pro e Mamba Monster.
Espero ajudar a todos

________________________________________________________________________________
Bem vamos as configuraçþes
Tela de inicio
Essa tela mostra o tipo de esc a ser configurado, nesse caso o esc Mamba Max Pro
Basic - Cutoff Voltage
- Cutoff Voltage O corte de tensĂŁo ĂŠ definido para proteger as baterias de LIPO, esse corte existe porque nas lipos nĂŁo se pode baixar a tensĂŁo para menos de 3v por cĂŠlula. Se vocĂŞ estiver usando NiMh ou NiCd vocĂŞ nĂŁo precisa de um corte de tensĂŁo para proteger as baterias.
Nesse campo se define se tem ou nĂŁo corte de tensĂŁo
** Caso use Lipo, sempre deixe esse campo em Auto-Lipo
- Auto-Lipo Volt/CellDefine a voltagem de corte das cĂŠlulas das baterias Lipos
** Dica para proteger as baterias ĂŠ recomendĂĄvel definir esse valor para 3,4V por cĂŠlula, fazendo isso, diminui bastante a tendĂŞncia das baterias incharem
- Reverse TypeWithout Reverse - RĂŠ desabilitada
Crawler Reverse - RĂŠ Direta, nesse caso o motor fica sem freio, a rĂŠ entra direto
** Nunca use essa configuraçþes em pistas ou em velocidade pq pode queimar o motor e quebrar a transmissão do RC
With Reverse - RĂŠ ativada
Motor DirectionUsado para reverter a direção do motor, util para quem esta utilizando o modo sensored, nesse modo não se pode inverter os fios sob o risco de queimar o motor
Normal - Sentido normal
Reverse - Sentido Reverso
Power-on Warning BeepEsta configuração ativa o sinal sonoro de aviso. O sinal sonoro de advertência faz o esc apitar a cada 20 segundos se o seu ESC Ê deixado na posição neutra. Isto irå alertar o usuårio se acidentalmente deixar a o RC ligado.
Brake AmountPercentual de freio, quanto maior o percentual maior o poder de frenagem
Drag BrakeFreia automaticamente quando se posiciona o acelerador em neutro. Isso Ê muito util em pistas, uma opção interessante Ê o 213% muito usado em crawlers.
Power Max Forward Power
Max Forward PowerDetermina o percentual de energia a ser mandado para o motor, ĂŠ um limitador de potencia
Max Reverse PowerDetermina a velocidade da rĂŠ
Punch ControlAnti-Drag, Ê como se fosse um controle de tração, limita a potencia na arrancada.
Torque LimitLimita o torque ou a força do motor
** Muita gente tem duvida sobre essa função, na realidade essa função tem como fidelidade limitar a quantidade de força que o motor produz sem reduzir a rotação maxima do motor, essa função pode ser muito util em situaçþes de quebra do rc por excesso de força do motor, pode ser muito util para evitar quebras de diferenciais e cardans (DICA PARA E-REVO)
Para ativar ĂŠ simples
- marque essa opção,
- clique em update
- Feche o castle link
- Retire o pinhĂŁo do motor
- Ligue o esc e o controle
- Acelere o motor no maximo por 3 segundos, o prĂłprio esc vai dar um aviso sonoro
- Ligue novamente o esc no castle link
- Defina os valores
- Pronto !!!
Advanced Bec Voltage
Bec VoltageDefine a voltagem que o esc vai mandar para o receptor, quanto maior a voltagem mais rapido vai ser o servo, mais cuidado acima de 6V muitos servos e coolers queimam !! Por isso cuidado
Arming TimeDefine um tempo de espera com o controle em neutro para o sistema armar ou ligar
Throltle Dead BandAjusta uma faixa morta proximo ao neutro. Valores mais baixos de dar uma resposta gatilho mais sensĂvel e valores mais elevados de dar uma resposta gatilho menos sensĂveis. A redução do valor demasiado pode causar problemas com alguns receptores e seu ESC pode nĂŁo acionar o motor. Isso ocorre porque o ESC estĂĄ Ă procura de um sinal muito especĂfico neutro e se o rĂĄdio nĂŁo estĂĄ morto na com o sinal (como quase nenhum deles ĂŠ com essa resolução de alta) nĂŁo aceitarĂĄ o que vĂŞ como neutro, ou seja nĂŁo mexa aqui ... hehehe
Start PowerEsta configuração controla o quanto de energia o ESC enviar para o motor do carro a partir do carro parado. Altos valores dependem de boas baterias
Sensorless Motor TimmingAjusta a quantidade de timming ou avanço a ser aplicada ao motor. Valores mais elevados aumentar a produção global de RPM, porem provocam sobre aquecimento do motor
Motor Type -
Brushed High-PowerUse essa configuração em motores escovados de alta potencia, nessa opção o motor fica sem rÊ
-
Brushed ReversingUse essa configuração para motores escovados com a opção de rÊ.
-
Smart Sense ⢠BrushlessEsta configuração permitirå que o ESC usar os sensores para ligar o motor sem cooging Uma vez que o motor estå funcionando, o ESC vai mudar para o modo sensorless e usar um sincronismo do motor mais eficiente sensorless. Este Ê o cenårio ideal para a execução de seu motor com a måxima eficiência.
-
Sensored Only (Sensors Required)Nessa configuração o esc sempre efetua a leitura do sensor, nessa opção pode ser ativado o C.H.E.A.T (Castle High Energy Advanced Timing), que Ê o timming dinamico.
C.H.E.A.T MODE ___________________________________________________________ C.H.E.A.T Timming Boost AmountEste ĂŠ exatamente o que diz, Boost. Ajusta a quantidade de Boost Timing (em graus) a ser aplicada a seu motor na faixa de RPM escolhida. Valores mais elevados aumentam o poder de impulsionar toda a gama do motor e aumenta a saĂda de RPM. Esta definição tem de ser ajustada com cuidado, pois ĂŠ fĂĄcil de causar danos irreversĂveis ao rotor / estator
C.H.E.A.T Activation RangeAjusta o intervalo de tempo em que o timming definido serĂĄ aplicado. Tipicamente entre 5,000-20,000 RPM ĂŠ um bom ponto de partida para a maioria dos motores e setups.
** Colocando na pratica **
Para entender melhor o boost ou timming dinamico suponhamos que coloque 50º de avanço de timming entre a faixa de RPM 5443-20,016 RPM. Isto significa que quando o motor atinge 5.443 rpm, o ESC irå começar a adicionar o timming, uma vez que o motor atinge 20.016 RPM os 50º de timming total serå aplicado.
Ou seja nesse intervalo de 14573 RPM (20016 - 5443) sera aplicado 3,3Âş Graus de timming a cada 1000 RPM
Quanto maior esse intervalo mais suave vai ser o avanço
EX.
5443-20,016 RPM sera aplicado 3,3Âş Graus de timming a cada 1000 RPM (14573RPM / 50Âş)
Quanto menor o intervalo mais agressivo Ê o avanço
EX. 5000-10000 RPM sera aplicado 10Âş a cada 1000 rpm
Ou seja o motor vai subir de giro muito mais rĂĄpido.
O pulo do gato ĂŠ chegar a um valor que de boa velocidade final + grandes retomadas
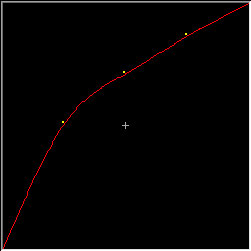
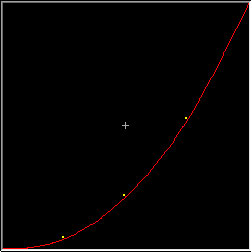
Throttle
Define a curva de aceleração
Sendo
Perfil agressivo
Perfil Suave
Perfil Linear
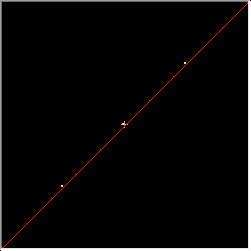
O mesmo principio vale para o
BrakeBem pessoal espero ter ajudado, qualquer duvida ĂŠ sĂł perguntar e se alguem quizer acresentar algo, fiquem a vontade o topico ĂŠ de todos !!










 pensei que fossem bem parecidos nas quantidades de opçþes,
pensei que fossem bem parecidos nas quantidades de opçþes,





